Система управления поворотным устройством (ПУ) реактивного сопла (PC) изменяет направление вектора тяги по сигналам СДУ самолета. Система управления ПУ РС питается топливом высокого давления от питающего контура высокого давления.
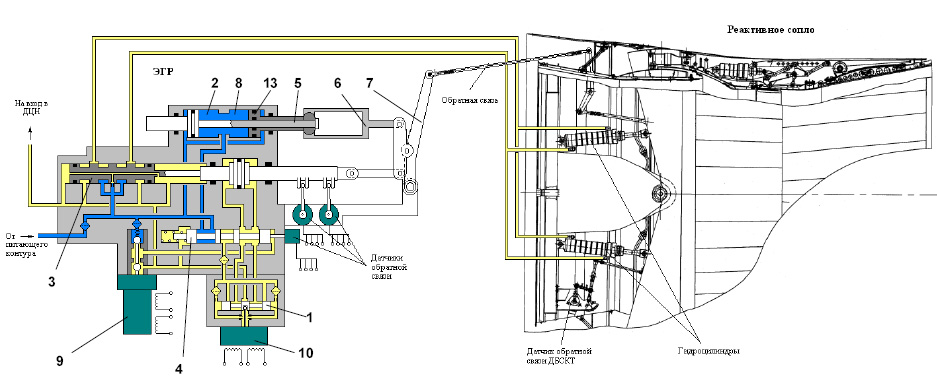
Рисунок 5.6.1 - Система управления поворотным устройством реактивного сопла
1 – управляющий золотник; 2 – гидроцилиндр; 3 – гидрораспределитель; 4 – гидроклапан включения; 5 – механизм приведения; 6 – упор; 7 – рычаг механизма обратной связи; 8 – межпоршневая полость; 9 – клапан электрогидравлический; 10 – усилитель электрогидравлический; 13 – поршень
Система включает:
Распределитель электрогидравлический ЭГР управляет по сигналам СДУ самолета отклонением поворотного реактивного сопла (ПРС). ЭГР работает от двух независимых электрических каналов управления и от одной гидравлической системы. Когда отказывает один из электрических каналов управления ЭГР, то он работает от другого канала с сохранением технических характеристик. В качестве рабочей жидкости используется топливо. ЭГР имеет резервный гидромеханический канал управления, который обеспечивает автоматический возврат ПРС в нейтральное положение если:
В процессе эксплуатации ЭГР технического обслуживания не требует.
Гидроцилиндры отклоняют ПУ PC по командам ЭГР. Гидроцилиндры установлены на неподвижном корпусе ПУ РС (рис. 5.6.1).
Обратная связь передает сигнал в ЭГР и СДУ самолета о положении подвижного корпуса ПУ PC.
В состав обратной связи входят:
Механизмы обратной связи размещены на неподвижном корпусе ПУ РС.
В начале запуска давление гидрожидкости, которое подводится к ЭГР от НП, мало. Гидроклапан включения 4 находится в крайнем правом положении. Информация по положению гидроклапана от датчика положения поступает к СДУ. ЭГК 9 обесточен и таким образом включена резервная система поддержания нейтрального положения ПРС.
Давление от питающего контура через гидроклапан 4 поступает в межпоршневую полость 8 механизма приведения 5. Поршень 13 выдвигается и фиксирует упор 6 рычага механической обратной связи 7. Обратная связь включается в работу.
Информация обратной связи о положении ПРС поступает к гидрораспределителю 3. Гидрораспределитель обеспечивает поддержание нейтрального положения ПРС путем изменения расхода в полости гидроцилиндров ПРС. При этом полости гидроцилиндра 2 через гидроклапан 4 соединены друг с другом. Линии управления от основного управляющего золотника 1 отключены и гидроклапан не оказывает воздействия на гидрораспределитель 3.
Давление жидкости на входе в агрегат, по мере роста оборотов, увеличивается. Давление от питающего контура, которое поступает под левый торец гидроклапана 4, становится достаточным для перекладки его в рабочее положение. Однако переключение происходит только при подаче от СДУ команды +27В на ЭГК 9. При поступлении данной команды ЭГК 9 переключается в рабочее положение и обеспечивает соединение левой полости гидроклапана 4 со сливом. Клапан 4 переходит в левое положение. Информация о переключении поступает к СДУ от датчика обратной связи гидроклапана и происходит переключение на основную систему.
Когда гидроклапан 4 переключается в рабочее положение, полости гироцилиндра 2 разобщаются. Управление гироцилиндром 2 подключается к основному золотнику. Одновременно межпоршневая полость 8 (через проточку в гидроклапане 4) соединяется со сливом. Поршень 13 перемещается вправо до упора, чем отключает фиксацию упора 6. Упор 6 получает свободное перемещение при отклонениях механической обратной связи. Тем самым отключается воздействие механической обратной связи 7 на гидрораспределитель 3.
Информация о перекладке гидроклапана 4 поступает в СДУ. После чего СДУ обеспечивает регулирование положения ПРС путем формирования токовых команд к электрогидравлическому усилителю 10 (моментному мотору).
В моментном моторе 10 электрические команды управления преобразуются в отклонение управляющей заслонки. При отклонении заслонки изменяется расход через сопла моментного мотора (увеличивает в одном и уменьшает в другом). Это изменяет усилия на левом и правом торцах управляющего золотника 1. Золотник перемещается пропорционально входящему электросигналу и изменяет расходы в полости гидроцилиндра 2. Происходит пропорциональное перемещение гидро-распределителя 3 и соответственно перераспределяется расход рабочей жидкости через гидроцилиндры ПРС, что вызывает отклонение ПРС. Информация обратной связи о положении гидрораспределителя 3 (от двухканального датчика обратной связи) и положении ПРС (три канала от 2-х датчиков ДБСКТ) поступает к СДУ. Обеспечивается необходимое качество регулирования.
При возникновении отказов в канале основного управления, СДУ снимает +27 В с ЭГК 9 (Логика работы канала управления ПРС в СДУ, логика отказов и пр. приведены в РЭ на самолет). Гидроклапан 4 переключается в правое положение. Включается резервная система поддержания нейтрального положения. Работа резервной системы приведена в режиме запуска.
Когда снижается давление гидрожидкости на входе в агрегат ниже (30+20) кгс/см2, автоматически происходит переход на резервную систему. Переход на основную систему происходит также автоматически, когда восстанавливается уровень давления. Вблизи малого газа могут происходить кратковременные переходы на резервную систему длительностью не более 2 с. Одновременно перекладываются гидроцилиндры створок РС и отклоняется ПРС. Это является нормальной работой.